一、需求分析
根據用戶方對于多盤抓取系統的實際需要,提出需求有如下:
1、機柜能容納1萬張容量為100GB的光盤,總存儲容量達到1PB;
2、柜內光盤按照12張為一套存放,并至少有12個光驅可用,還可以按12個一組擴展到84個光驅;
3、抓取12張光盤并分盤到12個光驅內部所用時間必須小于等于72秒;
4、柜子必須具備方便搬運、移動的特點;
5、抓取光盤與分盤必須可靠,穩定,安全,設計壽命為5年;
6、柜子的制造成本需要在72萬元人民幣以內;
7、機柜尺寸要求為深1.2米,高2.3米,寬600毫米;
二、總體方案設計
由于開發周期限制,決定在轉籠機構的單盤抓取系統的基礎之上,改進為可操作12張盤的抓取系統,其結構原理圖如下所示。
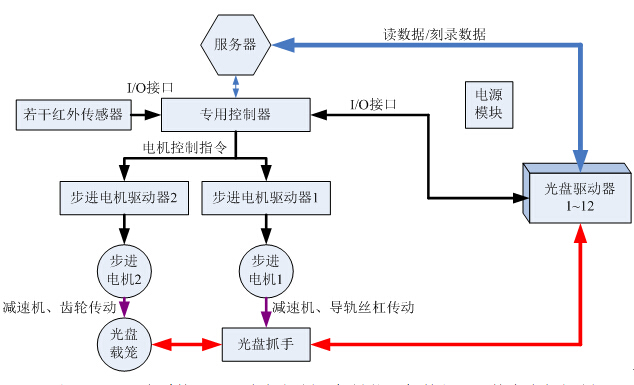
從上圖可知,該系統主要由電氣控制和機械執行機構組成,其中電氣控制主要由以下幾部分組成,上層服務器(包括固態硬盤),電源模塊,專用控制器,步進電機驅動器,傳感器;機械執行機構主要由下面這幾部分組成:導軌絲杠,光盤轉籠以及轉籠上的傳動齒輪,轉籠操作輔助立柱,步進電機,減速機,光盤抓手。其中光盤手抓能抓取12張光盤,轉籠每個槽能放12張光盤。
三、電氣控制功能說明
(一)上層服務器
上層服務器的主要功能有:
1、與用戶交互,存儲用戶數據到光盤中,從光盤中讀取數據;
2、與控制器交互,在固態硬盤中沒有數據或需要寫新數據時,發送指令給控制器,抓取光盤到光驅內;
控制器和服務器通過RS232相互訪問,這里以服務器為上位系統,討論服務器發送給控制器的指令。
服務器發送給控制器的指令:
(1)服務器寫數據或讀數據所需光盤的位置信息;
(2)放入光驅操作還是移出光驅操作。
(二)專用控制器需要實現的功能介紹
專用控制器是整套電控系統的核心部件,它主要有兩個功能。一個是和服務器的通信,另一個是對各個傳感器信號的讀入和步進電機、光驅的控制。
先說明專用控制器發送給服務器的數據:
(1)報警信號;
(2)各個光驅的狀態信號,包括光驅的開合狀態;
(3)動作完成信號。
然后介紹的是第二個功能。為了實現具體的功能,專用控制器還需要將服務器發送來的信息轉換為實際的操作指令,控制步進電機的運動,光驅的開合,手抓的抓放,并且控制器還能接收各種傳感器的信號。
這些控制中,專用控制器對步進電機的運動控制都是按照梯形加減速控制實現的。
根據上述的功能描述,可以確定控制器要有如下接口:
1路RS232的通訊信號;
2路PWM波信號用于控制大功率步進電機;
1路用PWM控制器的小功率步進電機驅動輸出;
1路用于控制抓取器的OUT信號;
3路限位開關IN信號;
1路光電傳感器檢測光盤有無的IN信號;
12*7=84路光驅控制OUT信號以及光驅開合狀態IN信號總共168路I/O信號;
為了加速開發設計,核心控制芯片選用本人用的最熟練的TMS320F28335,考慮到上面控制光驅要用到168個I/O接口,故選用Cyclone系列的EP1C12Q240C6(配置:EPCS4)來外擴I/O接口。
(三)步進電機驅動器以及傳感器
步進電機驅動器的功能就是將專用控制器的指令信號轉化放大為驅動步進電機的大電流脈沖信號。
系統中,會用到兩種傳感器,一種是光電傳感器,一種是接近傳感器。光電傳感器的作用是檢測是否有光盤存在,接近傳感器的作用是確定光盤抓手和轉籠的運動范圍。
(四)電源模塊
電源模塊包括濾波器和高功率的開關電源,除了服務器,其他電氣控制器件都需要電源供電。
四、機械執行功能說明
該系統的的機械部件包括:導軌絲杠,光盤轉籠以及轉籠上的傳動齒輪,轉籠操作輔助立柱,步進電機,減速機,光盤抓手。其中最為復雜的部件為光盤轉籠和光盤抓手。
(一)光盤轉籠
為了滿足一個柜子裝10000張盤,光盤轉籠分為120層,每層都可放置7*12張光盤,每個光盤匣均可單獨推出轉籠。光盤匣的推出與收回是通過安裝在光盤抓手上的頂桿和轉籠的旋轉運動實現的。
在需要推出光盤匣時,光盤抓手下降一定高度,使安裝上面的頂桿和待推出的光盤匣處于同一水平位置,并且待推出的光盤匣在抓手一側,此時轉籠順時針(從上往下看)旋轉,待推出的光盤匣被頂桿頂住,反推出光盤匣,光盤匣再被輔助立柱徹底打開。
收回光盤匣時,只需讓轉籠逆時針(從上往下看)旋轉,被另一根輔助桿頂回轉籠內部。
(二)光盤抓手
此系統的光盤抓手除了抓取12張光盤外,還能將12張光盤分次放入12個光驅內,并且能購將12張光盤取出,采用微型的帶鐵片雙絲杠和一個抓取器實現上述功能。其中絲杠上帶有鐵片,使用小型步進電機驅動,抓取器使用電磁鐵驅動。
抓手抓取12張的過程描述:雙絲杠旋轉使鐵片指向外側,收縮抓取器,并將抓取器伸到光盤內孔,展開抓取器,抬起12張光盤。
抓手將12張盤依次放入光驅的過程描述:旋轉絲杠將最底部的光盤和上面的光盤用絲杠上的鐵片分開,收縮抓取器,將一張光盤放入光驅中,繼續旋轉絲杠,讓剩下的光盤掉下有抓取器接住,重復上述過程,即可將所有光盤放入光驅中。
抓手依次收回12張光盤的過程:旋轉絲杠,使鐵片朝向外側,以便使抓手能將抓取器伸入光盤孔內,抓取器抬上1張光盤,然后用抓取器接近下一個待取光盤,收縮抓取器,將兩個光盤一起抬起來,旋轉絲杠,使鐵片將上一張光盤抬高,之后繼續用抓取器抓取兩個光盤,使用鐵片抬高上一張光盤,實現抓取12張光盤。
五、設備運行過程說明
執行光盤抓取任務,其具體過程如下:
服務器查詢其存儲的待查數據的對應光盤位置或編號,發送光盤位置或編號給專用控制器,讓其進行放入光驅操作,同時存儲光盤位置編號和對應光驅編號。
專用控制器接到命令后,控制轉籠和光盤抓手運動到指定位置,打開光盤匣,抓手抓取光盤后,將光盤送到光驅上方位置,在抓手到位后,專用控制器打開光驅,抓手將12張光盤依次放入光驅,放完最后一張光盤后,抓手上升到最高位置,收回光驅,發送指令完成信號給服務器,服務器讀取數據。
執行光盤放回光盤匣操作任務的具體過程如下:
服務器查詢光驅內部的光盤對應的位置或編號信息,將光盤位置或編號發給專用控制器,讓其執行移出光驅操作。
專用控制器接到命令后,控制轉籠運動到指定位置,光盤抓手運動到指定光驅上方,彈出光驅,抓取光驅里的光盤,收回光驅,將光盤放回轉籠內。